
To review the steps involved in positioning EYESEE Drone and the EYESEE Tags in your driveway, see the article Positioning EYESEE Drone in the aisle.
During the flight

 Pause mode during the mission.
Pause mode during the mission. Request to land before the end of the mission.
Request to land before the end of the mission. Perform a redo: the drone will repeat its movement in front of the location
Perform a redo: the drone will repeat its movement in front of the location
 Décaler le drone vers la droite ou la gauche
Décaler le drone vers la droite ou la gauche  Add an interest point
Add an interest point Percentage of EYESEE Drone battery (Bat) and remaining flight time.
Percentage of EYESEE Drone battery (Bat) and remaining flight time. Communication status with EYESEE Tags
Communication status with EYESEE Tags
The communication with EYESEE Tags is indicated by colour: when a tag is properly received, it appears in green. If the signal is weak or lost, the tag turns red.
When a tag turns red, it often means that the drone may become less stable in flight. If both tags turn red for too long, the drone may land automatically. Location code and progress bar. Number of steps performed / Total number of steps.
Location code and progress bar. Number of steps performed / Total number of steps. The counter displays the number of required codes (in this case, 2).
The counter displays the number of required codes (in this case, 2).
Meaning of pallet icons for missions with expected values
The colours of the squares represent the expected values and the codes scanned on the pallets:

A red frame means the code is mandatory to proceed, a white frame means it’s optional.
Meaning of pallet icons for blind missions
The colors of the squares represent the codes scanned on the pallets:

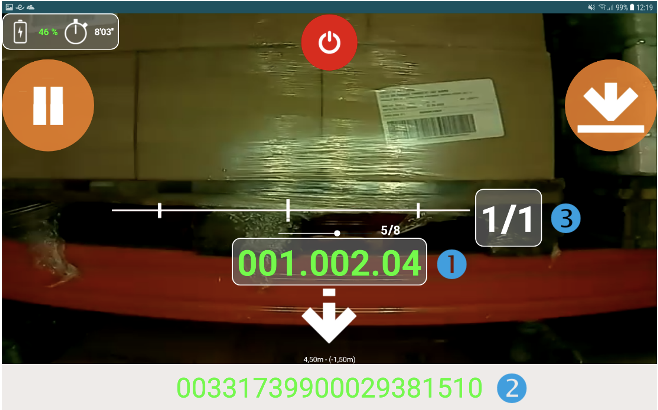
During the flight, if the code is successfully read

The code appears in green when it is read, along with the location name.
1. The code read appears here.
2. Indicates the number of mandatory acquisitions to be read / out of the number of acquisitions read.
During the flight, if a code cannot be read (NO_SCAN) at a location that is not empty

Pause mode during the mission Request to land before the end of the missionOnce the drone has completed its movement, it waits for validation from the operator according to two possible scenarios.
To repeat a movement and attempt to read the code on the second pass:
 Do a redo: the drone will repeat the movement in front of the location.
Do a redo: the drone will repeat the movement in front of the location.
![]()
![]() Move the drone to the right or left
Move the drone to the right or left
Depending on the case, two buttons may appear, or just one.

If two buttons appear, you can choose between declaring the location as empty or declaring a NO_SCAN (no label, label not readable, etc.).

Photo failure: the photo could not be taken
At the end of a movement, you may see this message. This indicates that the drone has not finished recording all the requested photos (the waiting time depends on the number of photos waiting to be received).

If the photos are not received after the allotted time, this message will appear in red with the icon and will ask you to repeat the movement in order to take the photo at the correct altitude.

If the problem occurs too frequently, it may mean that:
1. You are taking too many photos per location.
2. You are too far away from the drone's Wi-Fi module and the tablet's reception is being disrupted.
Execution of a mission, in flight/case of successful barcode reading
- The location code turns green when the code is read.
- The read barcode appears here.
- Indicates the number of mandatory acquisitions to be read / on the number of acquisitions read.
Execution of a mission, during the flight/case of non-reading of a code on a non-empty location
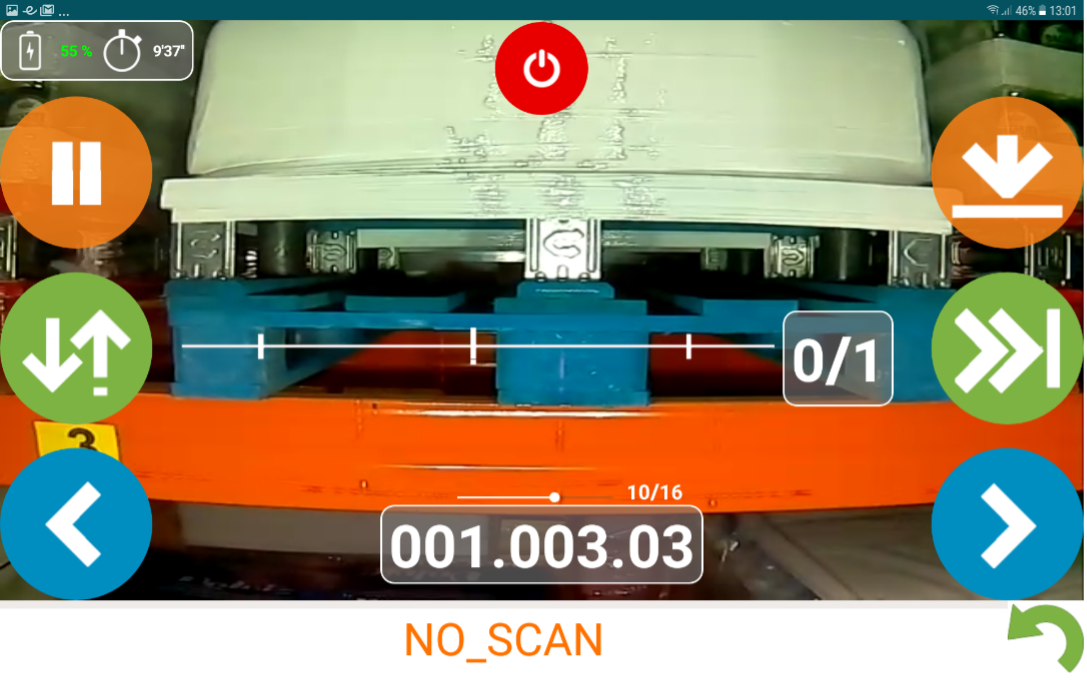
- Pause mode during the mission.
- Request to land before the end of the mission.
 Gives the order to restart the flight stage.
Gives the order to restart the flight stage. Validate the system proposal and proceed to the next step.
Validate the system proposal and proceed to the next step. Allows you to move EYESEE Drone to the left (see Parameters settings).
Allows you to move EYESEE Drone to the left (see Parameters settings). Allows you to move EYESEE Drone to the right (see Parameters settings).
Allows you to move EYESEE Drone to the right (see Parameters settings). Allows you to switch the choice of drone from NO_SCAN to EMPTY or from EMPTY to NO-SCAN.
Allows you to switch the choice of drone from NO_SCAN to EMPTY or from EMPTY to NO-SCAN.
In the case of a “mission restart” request, EYESEE Drone will automatically start reading from the first unread barcode before the mission is interrupted and then continue with the remaining mission barcodes.
The possible values are :
- « NO_SCAN » : When the location is not empty and reading is not possible (absence of the label, unreadable label etc.).
- « EMPTY » : If the location is empty.
Case of an obstacle detected under EYESEE Drone

- Allows you to move EYESEE Drone to the left (see Parameters settings).
- Allows you to move EYESEE Drone to the right (see Parameters settings).
In case of detection of an obstacle under EYESEE Drone the mission is stopped, and the drone remains in hover flight.
The mission cannot be resumed without a landing of EYESEE Drone. In this situation, the tablet vibrates and emits “beeps” indicating an abnormal situation.
It is the operator’s responsibility to keep a clear landing area under the drone, or move it to ensure that the drone has a cleared landing area in order to give the order to land.