
From the main screen, click on Settings:
Then click on Flight Settings:

1. Front distance:
Set the distance in CM between the drone and the pallets. The distance depends on the size of the barcodes to be read. For optimum barcode reading, we recommend setting a front distance of between 65 cm and 90 cm.
This is because:
→ Below 70 cm front distance, large codes will be read less well.
→ Above 90 cm front distance, small codes will be less well read.
2. Display a dialog box in case of code(s) read on an empty location
Allows you to be notified when the drone reads the code of a pallet located behind or at the back of an empty location and simultaneously detects the empty space.
3. Variable-size stacked pallet mode
Allows flight optimization with expectations on locations with stacked pallets.
In this case, on EYESEE Cloud, you must also set Automatic validation of empty locations to Yes for the corresponding scanner acquisition.
4. Lateral movements
Allows calibration of the drone’s manual offset when the flight is awaiting operator instructions.
- Left/right movement distance on single press → Default recommended value: 15 cm
Allows you to set, in cm, the lateral movement steps. This movement is applied when the pause mode is activated during flight. In pause mode, two buttons appear on the screen and allow you to reposition the drone to the right or left; the drone moves by this distance with each button press. The same screen appears automatically if the drone fails to read all mandatory configured acquisitions during a flight step. - Left/right movement distance on long press → Default recommended value: 30 cm
Allows you to set, in cm, the lateral movement steps on a long press (similar to the takeoff click). This movement lets the drone shift by a greater distance when the pallet is wide and extends over multiple locations.

Eyesee Drone can move at a speed between 40 cm/s and 100 cm/s.
Its movement speed affects the quality of code reading: for example, if Eyesee Drone moves too quickly, its scanner may fail to read all the codes.
1. Speeds
- Climb speed: Set the drone’s climb speed (in cm/sec).
- Descent speed: Allows you to set the drone’s descent speed (in cm/sec).
If a location is higher than 200 cm, activate this parameter.
WARNING: Never set a maximum height value higher than the height of the top beam.
3. Automatic Redo
An automated proposal for a first REDO is possible if:
-
A code could not be read despite the presence of a pallet and/or a label
-
There is a difference between the expected code and the code read
-
In case of an empty location
- Type
- Displacement
- Displacement distance
- Speed (cm/s)
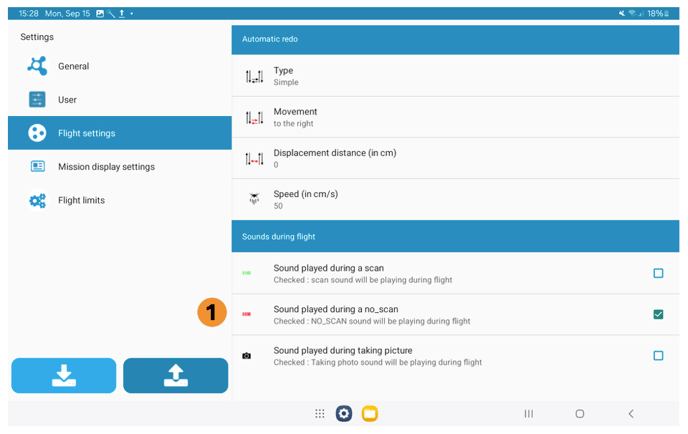
1. Sounds during flight
- Sound played during a scan
- Sound played during a NO_SCAN
- Sound played when a photo is taken