Pour revoir les étapes de mise en place de EYESEE Drone et des EYESEE Tags dans votre allée, consultez l'article Positionner EYESEE Drone dans l’allée.
Durant un vol
 Mode pause pendant la mission
Mode pause pendant la mission Demande d’atterrissage avant la fin de la mission
Demande d’atterrissage avant la fin de la mission Faire un redo : le drone va refaire le mouvement devant l'emplacement
Faire un redo : le drone va refaire le mouvement devant l'emplacement
 Décaler le drone vers la droite ou la gauche
Décaler le drone vers la droite ou la gauche Ajouter un point d'intérêt
Ajouter un point d'intérêt Pourcentage batterie du drone et temps de vol restant
Pourcentage batterie du drone et temps de vol restant Indication de la communication avec les EYESEE Tags.
Indication de la communication avec les EYESEE Tags.
Lorsque qu’une borne est bien reçue elle est en verte, lorsqu’elle est mal reçue elle est rouge. Dans le cas où elle devient rouge, on peut observer que le drone est souvent plus instable.
Si les 2 deviennent rouge trop longtemps, le drone peut se poser.
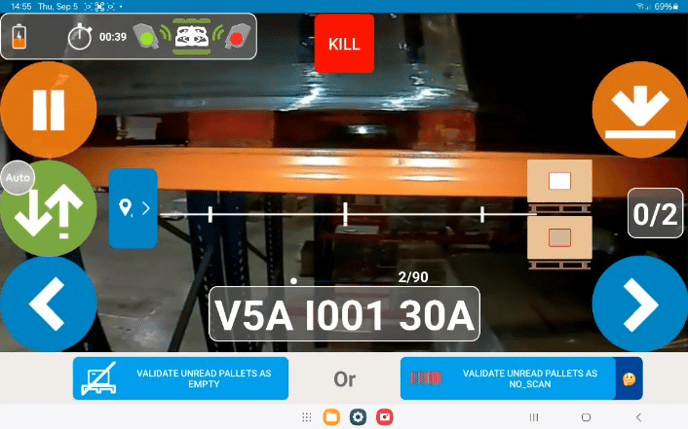
 Code emplacement et barre d’avancement. Nombre d’étapes exécutées / Nombre d’étapes total
Code emplacement et barre d’avancement. Nombre d’étapes exécutées / Nombre d’étapes total Le compteur affiche le nombre de codes obligatoires (ici 2)
Le compteur affiche le nombre de codes obligatoires (ici 2)
Signification des icônes palettes pour les missions avec attendus
Les couleurs des carrés représentent les valeurs attendues et les codes lus sur les palettes :
| Carré rempli en blanc : il y a un code attendu | |
| Carré rempli en gris : pas de code attendu | |
| Carré rempli en vert : le code lu correspond à l’attendu | |
| Carré rempli en rouge : le code lu ne correspond pas à l'attendu |
Un cadre rouge signifie que le code est obligatoire pour passer à la suite, un cadre blanc signifie optionnel.
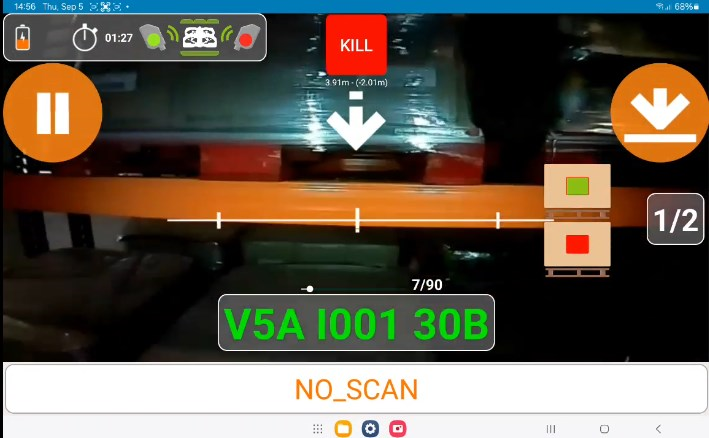
Signification des icônes palettes pour les missions en aveugle
Les couleurs des carrés représentent les codes lus sur les palettes :
| Carré rempli en vert : code lu |
|
| Carré rempli en rouge : palette détectée mais code non lu (NO_SCAN) |
|

Durant le vol, en cas de réussite de lecture du code

Le code apparaît en vert quand il est lu, ainsi que le nom de l'emplacement.
- Le code lu apparaît ici.
- Indique le nombre d’acquisitions obligatoires à lire / sur le nombre d’acquisitions lues
Durant le vol, en cas de non lecture d’un code (NO_SCAN) sur un emplacement non vide
- Mode pause pendant la mission
- Demande d’atterrissage avant la fin de la mission
Une fois que le drone a terminé son mouvement, il attend la validation de l'opérateur selon 2 cas possibles.
Pour refaire un mouvement et tenter de lire le code au second passage :
- Faire un redo : le drone va refaire le mouvement devant l'emplacement
- Décaler le drone vers la droite ou la gauche
Selon le cas, 2 boutons peuvent apparaître, ou un seul. 
Si 2 boutons apparaissent, vous pouvez choisir entre déclarer l'emplacement comme étant vide, ou bien déclarer un NO_SCAN (absence d’étiquette, étiquette non lisible etc.)

Cas d'échec photo : la photo n’a pas pu être prise
À la fin d’un mouvement, il est possible d’avoir ce message. Cela indique que le drone n’a pas fini d’enregistrer toutes les photos demandées (le temps d’attente dépend du nombre de photos en attente de réception).

Si les photos ne sont pas reçues après le temps imparti, ce message apparaîtra en rouge avec l’icône et vous demandera de refaire le mouvement afin de prendre la photo à la bonne altitude.

Si le problème est trop fréquent, cela signifie peut-être que :
- Vous prenez trop de photos par emplacement,
- Vous êtes éloigné du module wifi du drone et que la réception reçue par la tablette est parasitée.
Cas d’obstacle détecté sous le drone

- Décaler le drone vers la droite ou la gauche
En cas de détection d’un obstacle sous le drone la mission est arrêtée et le drone reste en vol stationnaire.
La mission ne pourra pas être reprise sans un atterrissage du drone. Dans cette situation, la tablette vibre et émet des « bips » indiquant une situation anormale.
Il est de la responsabilité de l’opérateur de libérer la zone sous le drone ou de la décaler pour garantir la disponibilité de la zone d’atterrissage et de donner l’ordre d’atterrissage.