Depuis l'écran principal, cliquez sur Paramètres :
Cliquez ensuite sur Paramètres de vol :
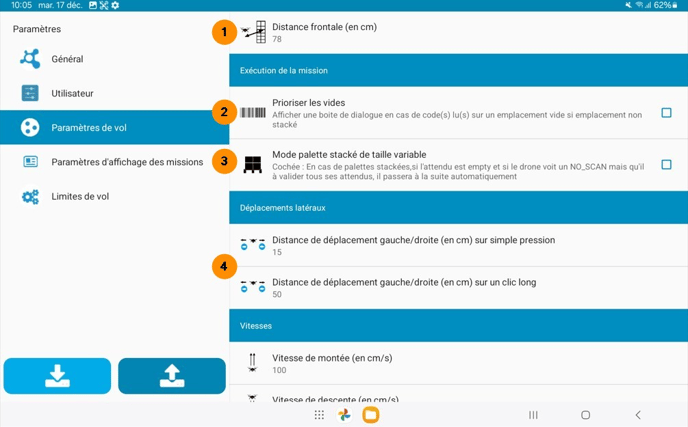
1. Distance frontale
Permet de paramétrer la distance en CM entre le drone et les palettes. La distance dépend de la taille des codes qui doivent être lus. Pour une lecture optimale des codes à barres, nous recommandons une distance frontale comprise entre 70 cm et 90 cm.
En effet :
→ En dessous de 70 cm de distance frontale, les codes de grandes dimensions seront moins bien lus.
→ En dessus de 90 cm de distance frontale, les codes de petites dimensions seront moins biens lus.
2. Afficher une boîte de dialogue en cas de code(s) lu(s) sur un emplacement vide
Permet d’être notifié(e) lorsque le drone lit le code d’une palette située derrière ou au fond d’un emplacement vide et qu'il détecte un vide simultanément.
3. Mode palette stackée de taille variable
Permet d'optimiser le vol avec attendus sur des emplacements à palettes stackées.
Dans ce cas, sur EYESEE Cloud, il faut également cocher à Oui la Validation automatique des emplacements vides de l'acquisition scanner concernée.
4. Déplacements latéraux
Permet de calibrer le déport manuel du drone quand le vol est en attente d’instructions opérateur.
- Distance de déplacement gauche/droite sur simple pression → Valeur conseillée par défaut : 15 cm
Permet de paramétrer en CM les pas de déplacements latéraux. Ce mouvement s’applique lors de l’activation du mode pause en vol. En mode pause 2 boutons s’affichent à l’écran et permettent de recaler le drone vers la droite ou vers la gauche ; le drone effectue un déplacement égal à cette distance à chaque impulsion sur les boutons. Le même écran apparait automatiquement si le drone n’a pas réussi à lire toutes les acquisitions paramétrées obligatoires lors d’une étape de vol. - Distance de déplacement gauche/droite sur un clic long → Valeur conseillée par défaut : 30 cm
Permet de paramétrer en CM les pas de déplacements latéraux sur un clic long (comme pour le clic du décollage). Ce mouvement permet de décaler le drone d’une plus grande distance lorsque la palette est d’une grande largeur et s’étend sur plusieurs emplacements.

Eyesee Drone peut se déplacer à une vitesse comprise entre 40 cm/s et 100 cm/s.
Sa vitesse de déplacement impacte la qualité de lecture des codes : par exemple, si Eyesee Drone se déplace trop rapidement, son lecteur risque de ne pas réussir à lire tous les codes.
1. Vitesses
- Vitesse de montée : Permet de régler la vitesse du drone en montée (en cm/sec).
- Vitesse de descente : Permet de régler la vitesse du drone en descente (en cm/sec).
2. Hauteur maximale où EYESEE Drone a le droit d’accélérer en cas de vide lors de montées (en cm). En cas d’emplacement supérieur à 200 cm, activer ce paramètre.
ATTENTION : Ne jamais paramétrer une valeur de hauteur maximale supérieure à la hauteur de la dernière lisse.
3. Redo automatique
Une proposition d’un 1er REDO automatisé est possible si :
1. La lecture d'un code n'a pas pu se faire malgré la présence d'une palette et/ou d'une étiquette2. Il y a une différence entre le code attendu et le code lu
3. En cas d’emplacement vide
- Type
- Déplacement
- Distance de déplacement
- Vitesse (en cm/s) : Permet de régler la vitesse du redo (auto ou manuel)

1. Sons en vol
Ces indications sonores peuvent être réglées ici :
- Son joué lors d’un scan
- Son joué lors d’un NO_SCAN
- Son joué lors de la prise de photo