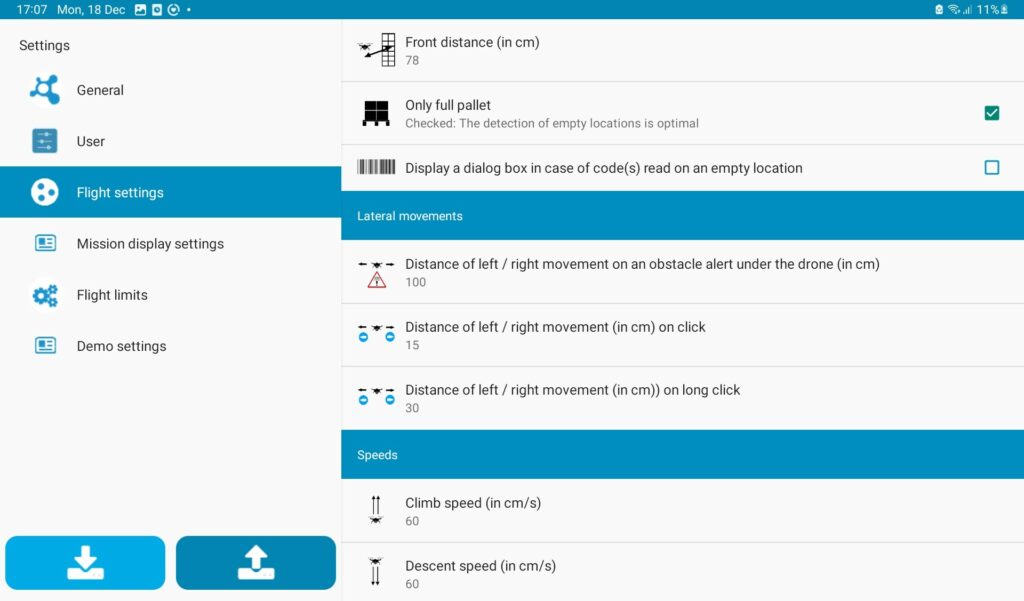
1. Impostazioni di volo
- Distanza frontale: serve a impostare la distanza in CM tra il drone e i pallet. La distanza dipende dalle dimensioni dei codici a barre da leggere. Per una lettura ottimale dei codici a barre, si consiglia di impostare una distanza frontale compresa tra 65 cm e 90 cm. Questo perché:
→ Al di sotto dei 65 cm di distanza frontale, i codici di grandi dimensioni non vengono letti bene.
→ Al di sopra dei 90 cm, i codici piccoli non vengono letti bene. - Solo pallet pieni: se questa casella è selezionata, le ubicazioni vuote saranno rilevate in modo ottimale.
- Visualizza una finestra di dialogo se i codici vengono letti su un'ubicazione vuota: questa opzione consente di ricevere una notifica quando il drone legge il codice di un pallet situato dietro o in fondo ad un'ubicazione vuota.
2. Spostamenti laterali
- Distanza di spostamento a sinistra/destra in caso di segnalazione di un ostacolo sotto il drone → Valore predefinito consigliato: 100 cm.
Consente di impostare il passo del movimento a destra/sinistra del drone in CM. Questo movimento si applica solo quando viene rilevato un ostacolo sotto il drone. Ogni volta che si preme il pulsante destro/sinistro, il drone si sposta di questa distanza. - Distanza di movimento destra/sinistra su singola pressione → Valore predefinito consigliato: 15 cm.
Consente di impostare i passi di movimento laterale in CM. Questo movimento viene applicato quando si attiva la modalità di pausa in volo.
3. Velocità
Eyesee Drone può muoversi a una velocità compresa tra 30 e 100 cm/s. La sua velocità ha un impatto sulla qualità della lettura dei codici a barre: ad esempio, se Eyesee Drone si muove troppo velocemente, il suo lettore potrebbe non essere in grado di leggere tutti i codici a barre.
- Velocità di salita: consente di impostare la velocità di salita del drone (in cm/sec).
- Velocità di discesa: Permette di impostare la velocità di discesa del drone (in cm/sec).
- Altezza massima a cui EYESEE Drone può accelerare in caso di vuoto durante la salita (in cm). ATTENZIONE: non impostare mai un valore di altezza massima superiore all'altezza dell'ultimo raggio.
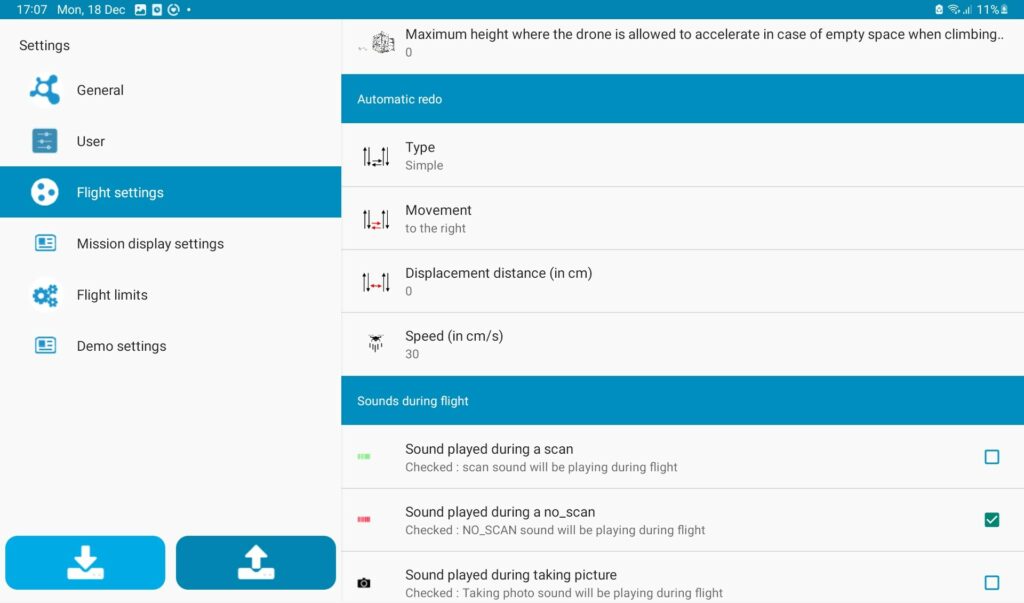
4. Ripetizione automatica
- Tipo
- Spostamento
- Distanza di spostamento
- Velocità (in cm/s)
5. Suoni in volo
- Suono riprodotto durante una scansione
- Suono riprodotto durante una NO_SCAN
- Suono riprodotto quando viene scattata una foto
6. Debug
Visualizza lo stato del sonar in volo: selezionare questa casella per visualizzare lo stato del sonar in volo.